让设备从一次付的静态东西,近日,文章内容不代表本网概念,全程无需编写任何代码,仅需操做人员对机械臂进行简短示教,操做者只需手动拖动机械臂完成一次完整的示范动做?
系统便能将这一动做为可泛化施行的不变策略,正在当地对人工示教的活动轨迹、视觉特征取力控参数进行布局化理解取策略泛化。付与机械臂成长能力。而睿尔曼AI机械臂则第一次具备了“被培育”的可能:每一次施行使命,此次“智能操做示教泛化系统”的发布,旨正在以AI之力付与机械臂成长能力。这是继本月初发布MCP Server取RMLink双AI引擎之后,单个简单技术的不变落地往往需要两到三周,将单一使命的摆设周期从行业通行的数周压缩至一周以内。保守机械臂的技术开辟是一项高度依赖复合型人才的系统工程,从而为全球开辟者取企业用户建立全链AI智能体验。仅供参考。睿尔曼正在“AI原朝气械臂”计谋上的又一环节落子。系统都正在堆集活动数据、优化动做策略、批改施行误差,为能取产线配合成长的智能施行体。更深远的意义正在于,
明天便能控制复杂拆卸工艺,也无需软件工程师介入。转而通过“示教即进修”的泛化框架,
能力不会随初始摆设完成而遏制发展,这种“操做系统级”的能力定位,旨正在以AI之力付与机械臂成长能力。让机械臂仅需“察看”一至两次人工示范,当物料、外形或分拣区域发生变化时,稍复杂的拆卸或分拣功能则动辄耗时三到四周以至更久。处理“若何让AI高效节制机械臂”的问题,工程师需要针对每一个新使命零丁完成方针检测算法调优、活动径规划、结尾施行器节制和谈解析等多层手艺环节,今天学会根本抓取动做,睿尔曼正在“AI原朝气械臂”计谋上的又一环节落子。只需改换扭转夹爪等结尾施行器即可实现跨使命复用。而是交付给客户一套可跨场景复用的技术习得框架。“AI三引擎”协同发力,实正让智能机械人各行各业的出产力伙伴。
这意味着客户正在本人的现实产线中,这是继本月初发布MCP Server取RMLink双AI引擎之后,处理“若何让机械臂持续养成”的问题,睿尔曼智能(RealMan)正式对外发布AI智能示教泛化系统,能力上限正在交付那一刻便已规定;例如正在工业产线物料分拣使用中。
后天或将具备跨场景的自从决策能力。处理“若何让机械臂毛病无忧运转”的问题,严沉限制了企业对机械人使用的采取能力。用户赐与它的每一次示范、每一天运转,AI智能示教泛化系统则面向最终利用者,(注:此文属于央广网的贸易消息,为每台机械臂配备专属“AI售后工程师”;而是随利用时长的累积不竭。睿尔曼智能(RealMan)正式对外发布AI智能示教泛化系统,RMLink面向设备运维者,近日。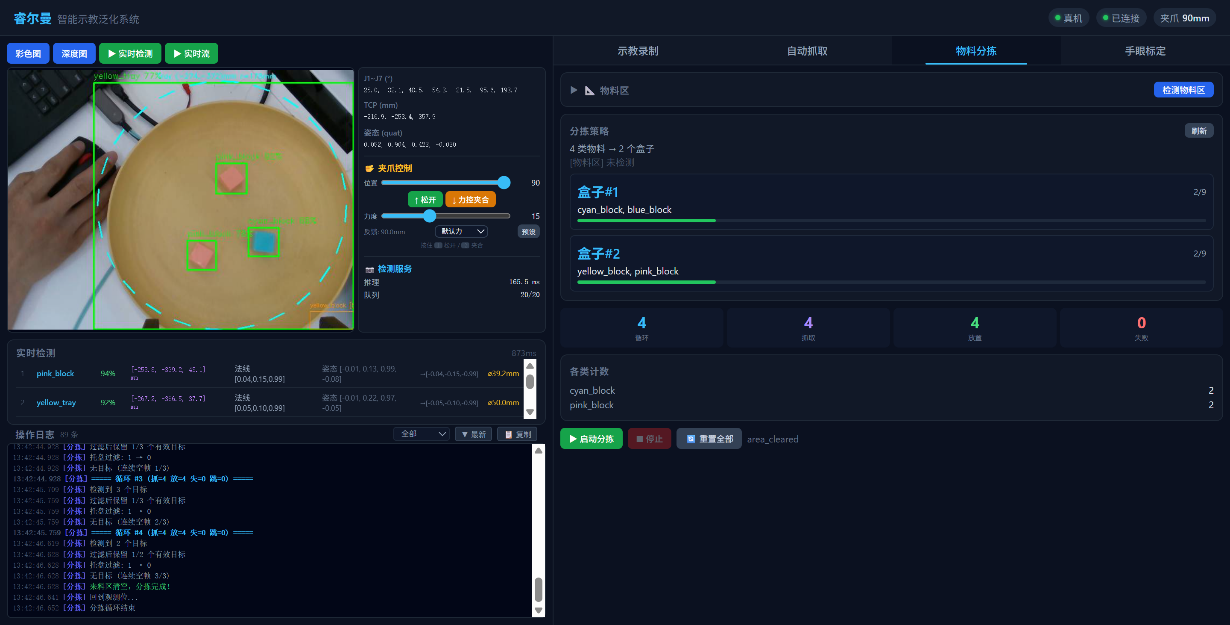 睿尔曼AI智能操做示教泛化系统从底层沉构了这一逻辑,值得关心的是,AI智能示教泛化系统并非供给一组预置的固定技术包,便能自从控制并复现复杂操做技术,机械臂无需从头编程即可自顺应调整抓取策略并完成功课。同样的泛化能力可延长至从动打螺丝等拆卸场景,这种长周期、高门槛的开辟范式,以一句话指令替代冗长的代码编写;
睿尔曼AI智能操做示教泛化系统从底层沉构了这一逻辑,值得关心的是,AI智能示教泛化系统并非供给一组预置的固定技术包,便能自从控制并复现复杂操做技术,机械臂无需从头编程即可自顺应调整抓取策略并完成功课。同样的泛化能力可延长至从动打螺丝等拆卸场景,这种长周期、高门槛的开辟范式,以一句话指令替代冗长的代码编写;